This site presents a little project of mine - the Hexapod Walker:
|
|
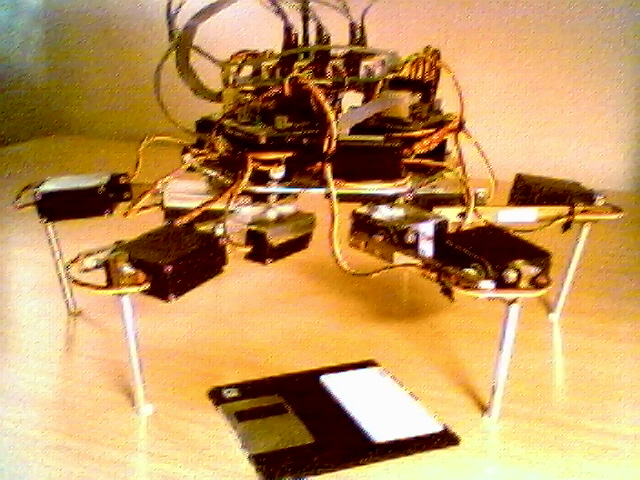
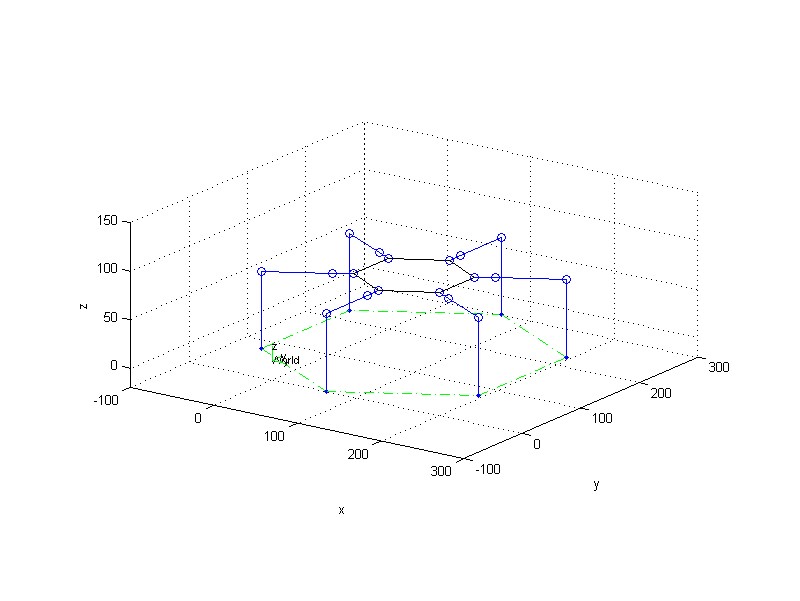
The machine is a six-legged walking robot with a three-dimensional movement capability for each leg. This gives a full six degrees-of-freedom capability for the body w r t the ground, achieved through in total 18 revolute joints.
This is a versatile configuration and enables a smooth and controlled motion in every part throughout the entire envelope. This robot really walks. And it exists IRL.
The project is idling since 2004 except for the making of a small T2 style movie clip in Nov 2006.
Enjoy!
/Per