Here are some samples of the physical robot in motion. The first few clips are captured in the lab by the cheap web-cam that came with my computer. The Complex Motion clips are captured with a digital camera known as Canon Ixus 50 in some countries.
The sequences are generated off-line by the mathematical model. They consists of plain ASCII text files with servo commands. The command stream is transferred via the RS-232 serial line (19200 baud for these samples) by a TclCL/Tk-script with a simple GUI.
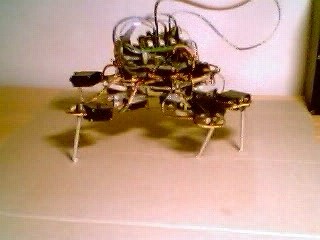
Note that due to the weak servos the robot almost cannot support it's own weight in certain leg configurations (when the weight is heavily transferred towards a single leg). This also causes a little bumpy tripod shifts (when the body weight is transferred from one tripod to another) during gait. Theoretically the body motion is smooth.
Due to lack of web site space the movies have low resolution and are small (and few). The web-cam proves again its quality with skipped frames, artefacts and distortions...
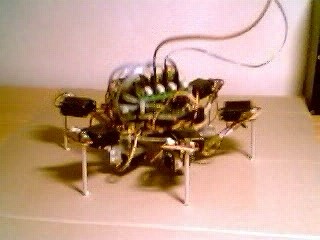
These clips show different motion while the robot is standing with all feet on the ground surface all the time. They demonstrates all 6 degrees of freedom (one at a time) that the body can move in: linear motion along the x, y and z dimensions, and angular motion along the roll, pitch and yaw dimensions.
In this linear-motion clip, the motion is performed in a coordinate system located at the center of the body plate (when the robot is in neutral position):
|
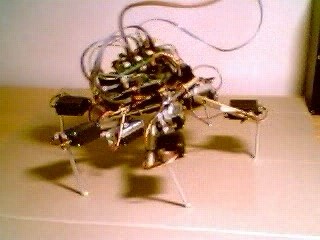
This is the case in this angular-motion clip too:
 |
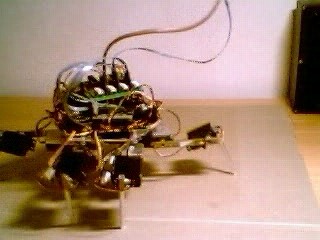
In the next angular-motion clip, the coordinate system is located at surface level directly under the body. You can see that the center of rotation is lower in this clip than in the above. (This capability is particularly suitable for compensation of the body orientation on sloping ground surfaces.)
 |
The robot can of course move around all these reference systems, and more, in parallell.
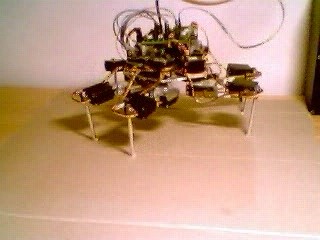
The following clips show a more complex motion, tripod gait, which adds cyclicity and motion mixed in several dimensions.
In this clip the robot's body trajectory describes a square showing straight line gait in four directions (x and y):
 |
This clip shows the robot turning around it's own (z) axis:
 |
The following clip shows the straight line gait motion mixed with the turning resulting in a curve:
 |
All the motion capabilities showed above, and several more, can be mixed together (such as changing body position and orientation simultaneously while performing curved gait) thus generating complex body (and leg for that matter) trajectories.
In October 2006 I woke up the hexapod and played around with my local movie editing software and came up with the movie/teaser/trailer "Per's Hexapod - the Movie, T2 style". It shows some snapshots from the development and some motion capabilities of the robot. The movie is available both from this site and from YouTube.
 |
|
| 13MB local wmv file | YouTube (lower quality) |
I have also uploaded a few raw, unedited, clips on YouTube for those of you who are more interested in robot motion than my movie editing skills ;).