Overview
The first serious thoughts about launching this project actually came to my mind about 1997. It is a private project I run at home just for fun. It is purely inspiration-driven so I only work on it when I feel for it (preferably during rainy winter nights :). You could say it's a long term project...
As important as actually building the robot has been to play around in as many engineering fields as possible. I've not taken the easiest way out - I could have just bought many components off-the-shelf... I'm especially proud of the electronics and the motion control.
Here's the project policy, sort of:
- Have fun!
- Do it yourself!
- Try new disciplines!
- No cheating!
- Keep the costs low!
Hence, the project spans over a wide range of engineering areas. Here are some examples: (Warning: buzz ahead;):
- Design of the robot's mechanical configuration and kinematics.
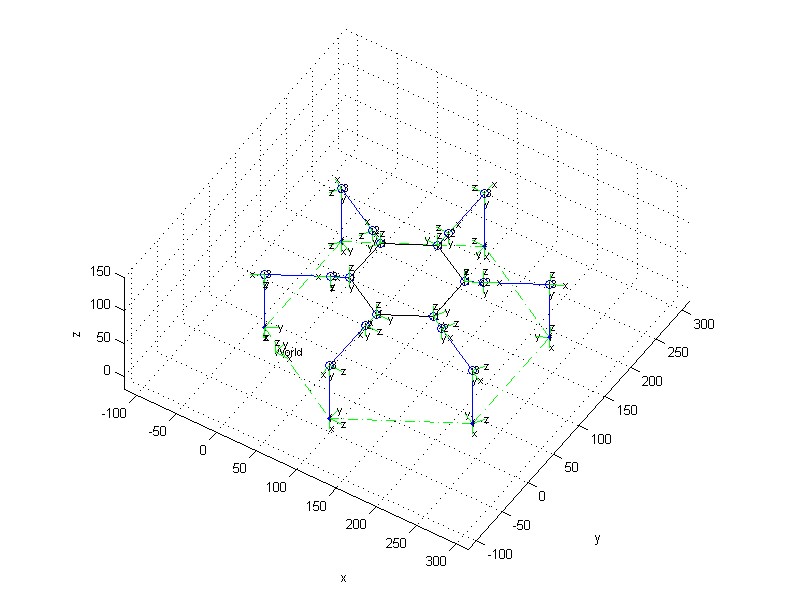
- Development of a mathematical 3-D wireframe model for visualization, kinematics modelling and development of movement control.
- Evaluation and choice of processors, compilers, simulators, programmers et c.
- Development of a fully configurationable, low-cost, reuseable, general and modular principle for electronics and communication.
- Design and manufacturing of schematics and PCBs for the multiprocessor on-board robot electronics.
- Development of real-time controller software (hub and servo-processors so far, sensor units in the future). Central robot control software yet to come.
- Design and manufacturing of the physical robot.
- Design of this little home page :)
Some robot properties in short:
- Six legs, actuated by 18 standard RC-servos
- Electronics: hierachical, modular, expandable and cheap
- Servo processors: 4 MHz PIC16F84 or PIC16F628
- Hub processor: 20 MHz PIC16F628
- Robot processor: a standard desktop PC or PalmPilot so far
- Computer interface: RS-232
- Maximum number of PCBs possible to control from the hub (with additional PCBs): 8
- Sensors: none (yet)
I also want to apologize for the lousy image quality - it's due to the equally lousy web-cam that came with my computer.